
2015 / 16
Semester MAS
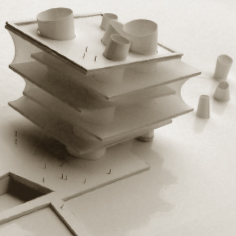
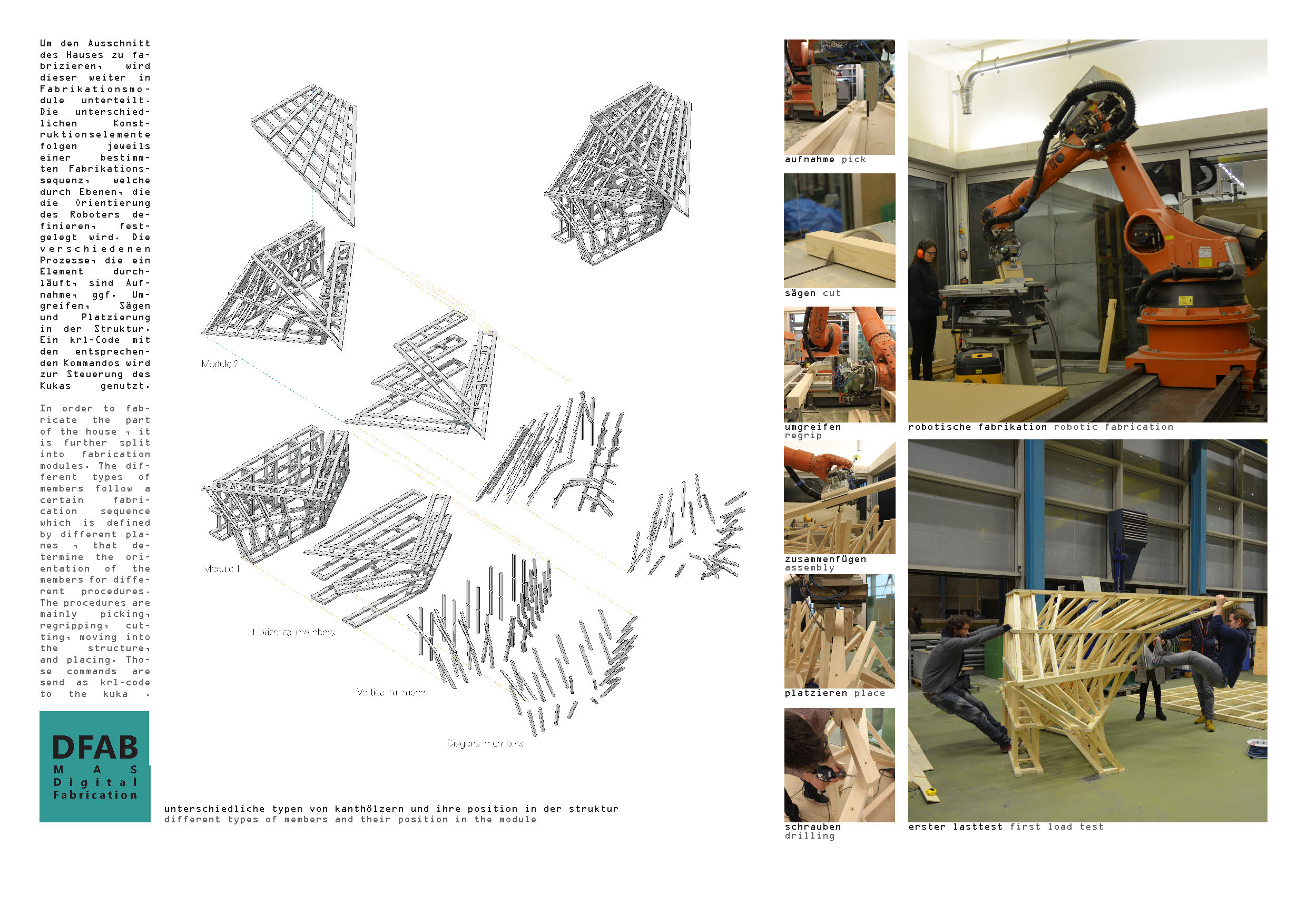
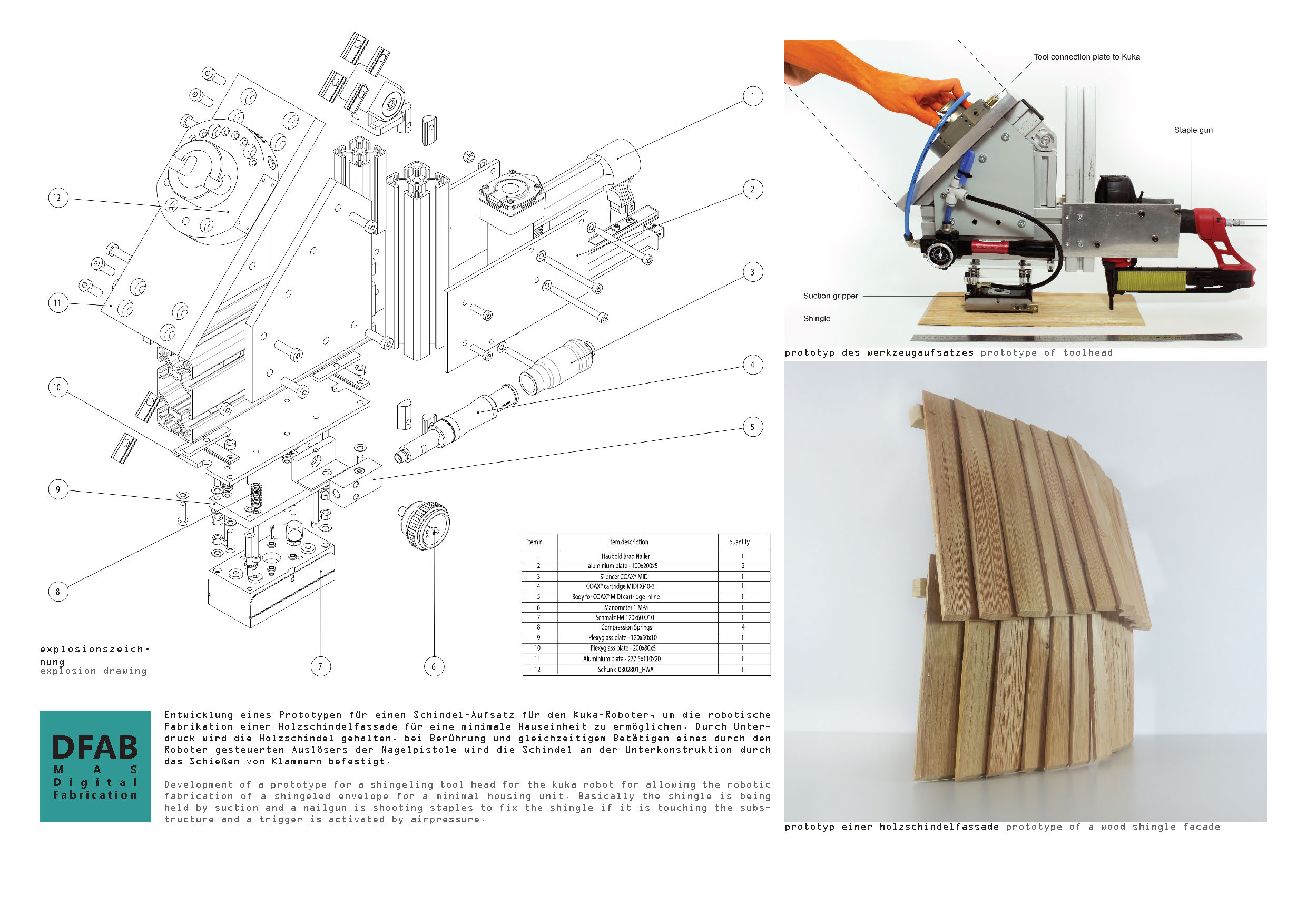
Die Frage nach der Verbindung zwischen digitalem/ parametrischem Entwurf und physikalischem Modell ist einer meiner Antriebsmotoren, sodass die Programmierung eines Kuka-Roboters zur Fabrikation eines Hausprototypen ein wichtiger Schritt für mich war.
One of my main drives is the question of the interdependency between digital / parametric design and physical model. Thus the programming of a Kuka robot (with 6 degrees of freedom and an external axis) to fabricate a prototype of a minimal housing unit, was an important step for me.
>> Master of Advanced Studies in Architecture and Digital Fabrication, ETH Zürich

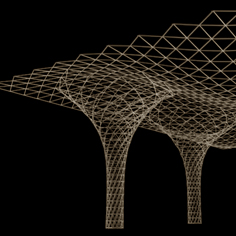
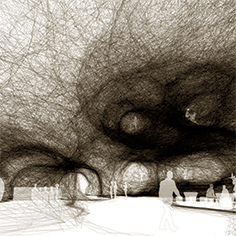
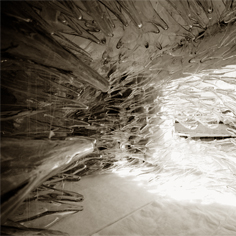
Aus den erstem Prototypen hat die MAS Gruppe einen Pavillon entwickelt. Dabei habe ich bei der Programmierung der Roboter-Bewegungen und deren Export von Grasshopper (Rhino) / Python nach RobotStudio geholfen. In RobotStudio wurden die ABB-Roboter Bewegungen erst simuliert und dann später zur tatsächlichen Fertigung genutzt.
From initial prototypes the MAS group develloped a pavilion. I helped programming the robot movements and their export from Grasshopper (Rhino) / Python to RobotStudio, where the movements of the ABB-robots were simulated, before being used for actual fabrication.