Plasticity of Mirrors is a robotic swarm species designed for the democratic creation of a collective intelligence seeking new possibilities of human relationality with emergent beyond-human species.
2025
Materials:
10 x two-wheeled differential drive robots with: custom PCBs (rigid + flex), microcontrollers, 2 x brushless motors with magnetic encoders, magnets, IMU (Inertia Measurement Unit: accelerometer, gyroscope, temperature sensor), distance sensor, loudspeaker, RGB Leds, 3d printed body.
Habitat: Circular platform with grey vinyl, robot positioning system, hand tracking, computer.
Dimensions: Robot: ⌀68 mm, h:40 mm, Habitat: ⌀1800 mm, h:100 mm, (Human area +1000 mm surrounding)
About
Plasticity of Mirrors is a new robotic swarm species for the democratic creation of a collective intelligence that offers a utopian narrative for the future of robotic ecosystems at this critical moment where AI meets embodiment.
The work creates a feeling of closeness with and curiosity towards the robotic lifeform to act as a counterpoint to the fears surrounding AI and robotics (which would paradoxically lead exactly into that direction).
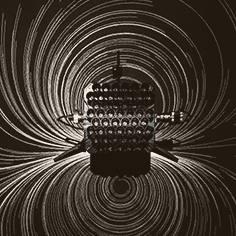
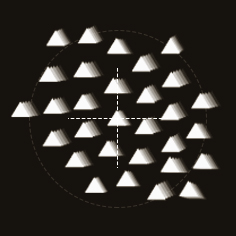
In a dark environment, the round, glowing, two-wheeled entities roll on a circular platform, each chirping, clicking, rumbling, creating their species’ own soundtrack. Having the ability to combine translation and rotation into unexpected pathways, the lifeforms are interacting with each other and with the hands of the human observers.
Hands and robots become one fluid organism manifesting Catherine Malabou’s concept of plasticity by engaging both species’ capacity to receive form (malleability) and to give form (creativity) in a dynamic process that involves both the ability to change and the ability to resist change.
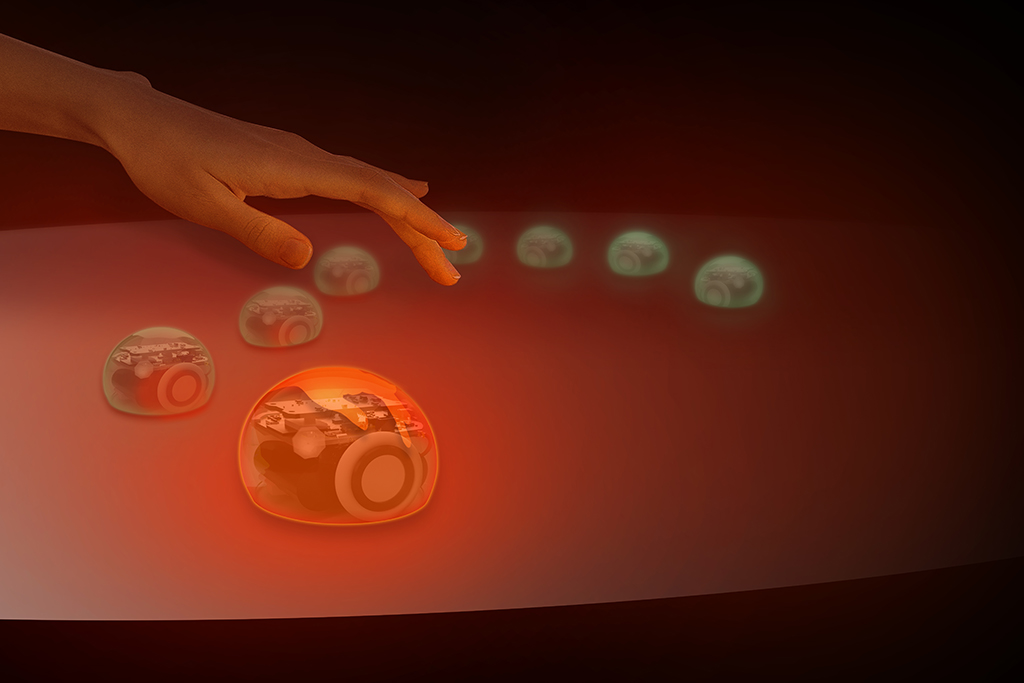
Through playful interaction, the swarm robots become an artificial extension of the human body. Embodying the swarm by pushing and pulling the entities with the hand, gives the human the sensation of having an additional body part that they control. In the evolution of the interaction, the swarm will evolve their own intentions, linking the human to their own movements and pulling the human in return.
The ambivalence of power and the experience of turn taking of control transcends the human to regard machines as social actors and to question the influence of technology in our everyday life.
Fundamentally, the work strives to recalibrate the cognitive tissue that binds human and machine and to administer preventative medicine against a dystopian future.
Experimenta Emergence – National Tour of Media Arts
- Noosa Regional Gallery, Tewantin (QLD)
14 Jun 2025 – 17 Aug 2025 - New England Regional Art Museum, Armidale (NSW)
4 Apr 2026 – 17 May 2026 - The Lock-Up, Newcastle (NSW)
29 May 2026 – 2 Aug 2026 - Plimsoll Gallery UTAS, Hobart (TAS)
22 Aug 2026 – 11 Oct 2026 - Pinnacles Gallery, Townsville (QLD)
13 Feb 2027 – 27 May 2027
—
![]()
The work has been commissioned by Experimenta.

![]()
The project is supported by the Goethe-Institut.
Electronics Design:
Richard Unger aka Small Robotics.